
| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| 8 | 9 | 10 | 11 | 12 | 13 | 14 |
| 15 | 16 | 17 | 18 | 19 | 20 | 21 |
| 22 | 23 | 24 | 25 | 26 | 27 | 28 |
| 29 | 30 |
- S-FHSS
- PIC18F47Q10 CURIOSITY NANO
- 탱크로봇
- PICKIT
- 거미로봇
- MCC
- 후타바
- MPLAB X IDE
- XT90
- RC헬기
- 배터리
- CCS-C
- 한글지원
- 메뉴얼
- 조종기
- 개발보드
- PIC
- PIC16F877A
- PIC마이컴
- MOSFET
- RC헬기 호버링 연습
- T16IZ
- 서보모터
- mplab extension for vscode
- Microchip
- 전류
- PIC18F47Q10
- 리얼플라이트 고블린
- 리얼플라이트 9.5s
- 리얼플라이트
- Today
- Total
"Electronic Enginerring Odyssey"
6족 거미로봇 제작기 (Part.3) 6-legged Spidre Robot Maker (part.3) 본문
6족 거미로봇 제작기 (Part.3) 6-legged Spidre Robot Maker (part.3)
Jerry_Lee_99 2024. 1. 12. 00:431개의 다리를 테스트 완료하였고 이제 나머지 5개의 다리 부품을 모두 3D프린터를 이용하여 출력하였다. 모터의 토크를 고려하였을 때 3D프린터의 출력 밀도를 높게 하지 않는 것이 유리하였으나 자체 중량을 견디기 위해서는 어느 정도 높은 밀도를 선택하여야 했다.
One leg has been tested, and now all five leg parts have been printed using a 3D printer. Considering the torque of the motor, it was advantageous not to increase the output density of the 3D printer, but a certain high density had to be selected to withstand its own weight.


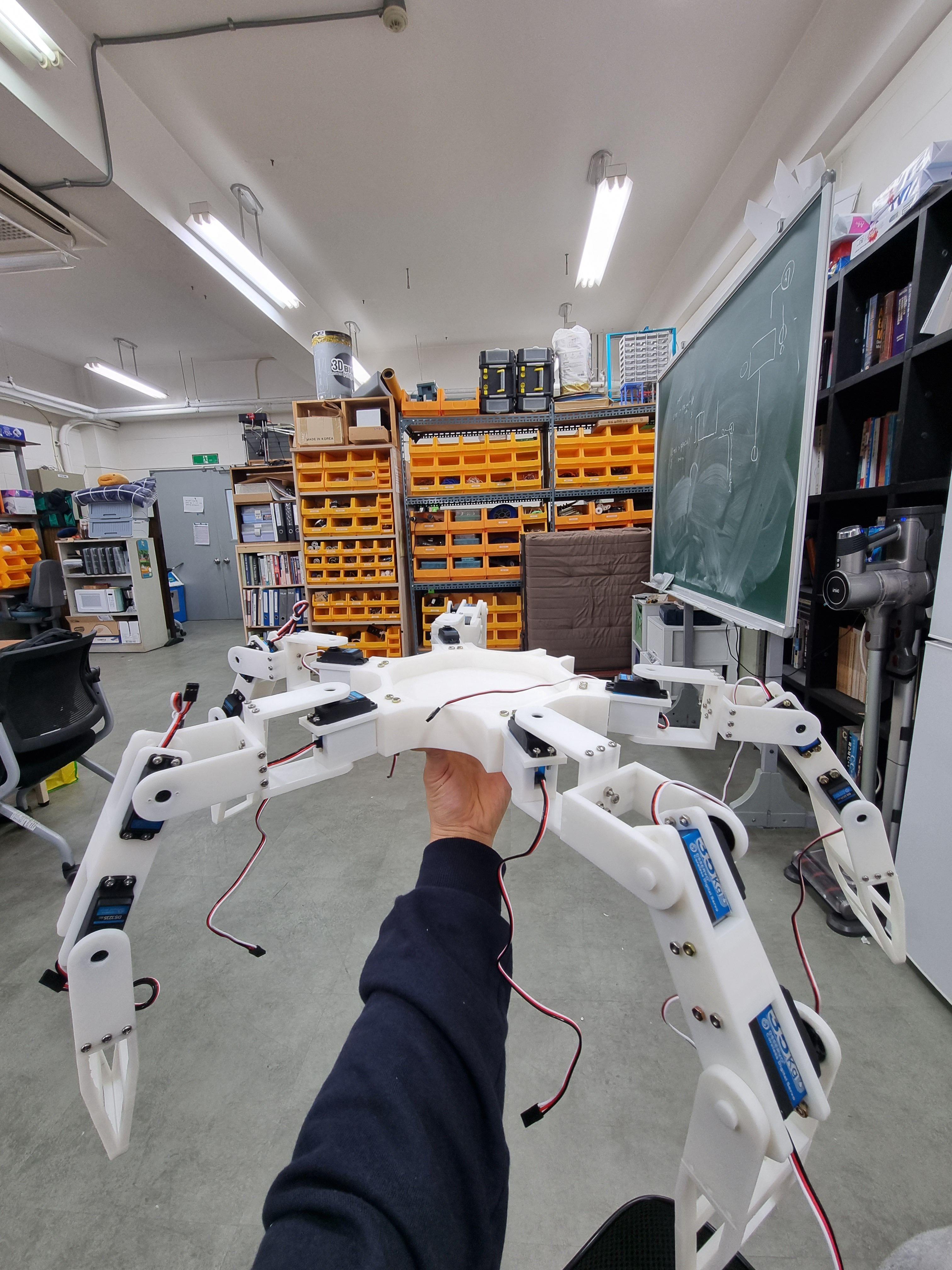
배터리를 결합하지 않은 형태였음에도 불구하고 외형의 무게가 상당했다. 모터가 무게를 견딜까에 대한 우려가 생기기 시작했다. 결론 부터 말하면 모터의 문제는 없었다. 단 전류의 문제가 발생했다. 초기 스타팅시 순간적으로 모든 모터에서 전류를 끌어가려고 하다 보니 모든 다리가 동시에 동작하는 것이 아니라 딜레이가 생기기도 하고 어떤 경우에는 1개의 다리가 움직이지 않는 경우도 있었다. 이미 우려했던 문제긴 했지만 결코 쉽게 해결할 수 있는 문제는 아니었으며 교수님의 도움을 받아 MOSFET을 이용한 파워회로 설계 후 해결할 수 있었.
(Power 연구실답게 High Voltage, High Current 사용)
Despite the fact that the battery was not connected, the weight of the exterior was considerable. Concerns began to arise as to whether the motor would withstand the weight. In conclusion, there was no motor problem. There was a single current problem. When starting the initial stage, trying to pull current from all motors momentarily, not all legs operate at the same time, but there was a delay and in some cases, one leg did not move. Although it was already a concern, it was never an easy problem to solve, and with the help of a professor, it was possible to solve it after designing a power circuit using MOSFET.
(Use High Voltage, High Current like Power Lab)
회로 부착 후 한 번에 쭉 일어나는 것을 확인할 수 있는데 회로를 부착하기 전에는 모터가 떨린다거나, 아예 일어나지 못하는 현상도 함께 나타났다. 아래의 영상은 개발 초기 단계부터 전류부족으로 인해 다리가 온전히 펴지지 않는 모습 여러 형태의 동작을 테스트 하는 영상을 나타내고 있다.
After attaching the circuit, it can be seen that it rises all at once, but before attaching the circuit, the motor trembled or could not occur at all. The video below shows a video of testing various types of motion in which the legs are not fully extended due to a lack of current from the early stages of development.
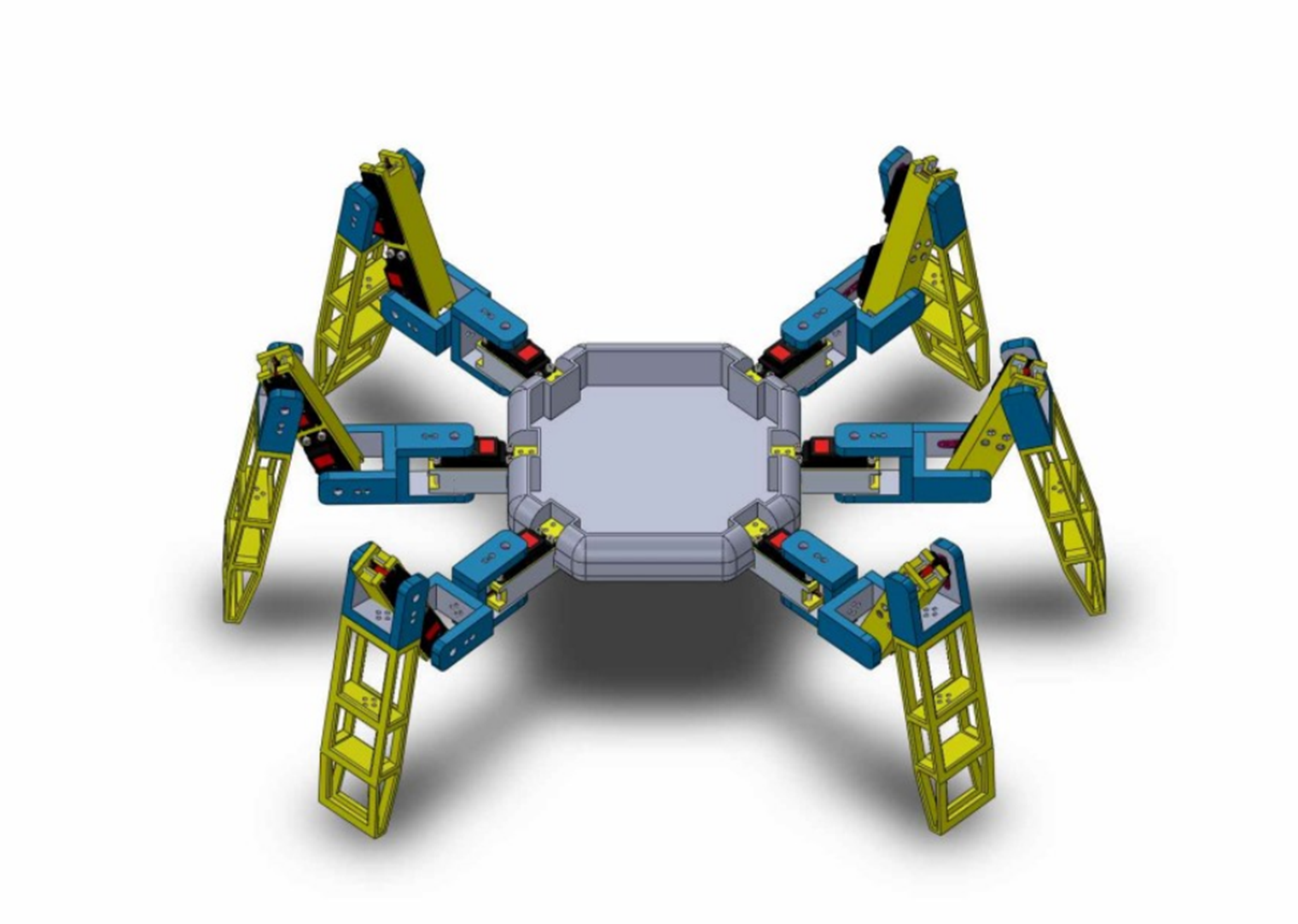
이때까지 포스팅한 모델은 과학적 혹은 구조적으로 알맞게 제작된 것이 아니라 본인 멋대로 제작된 형태이다.
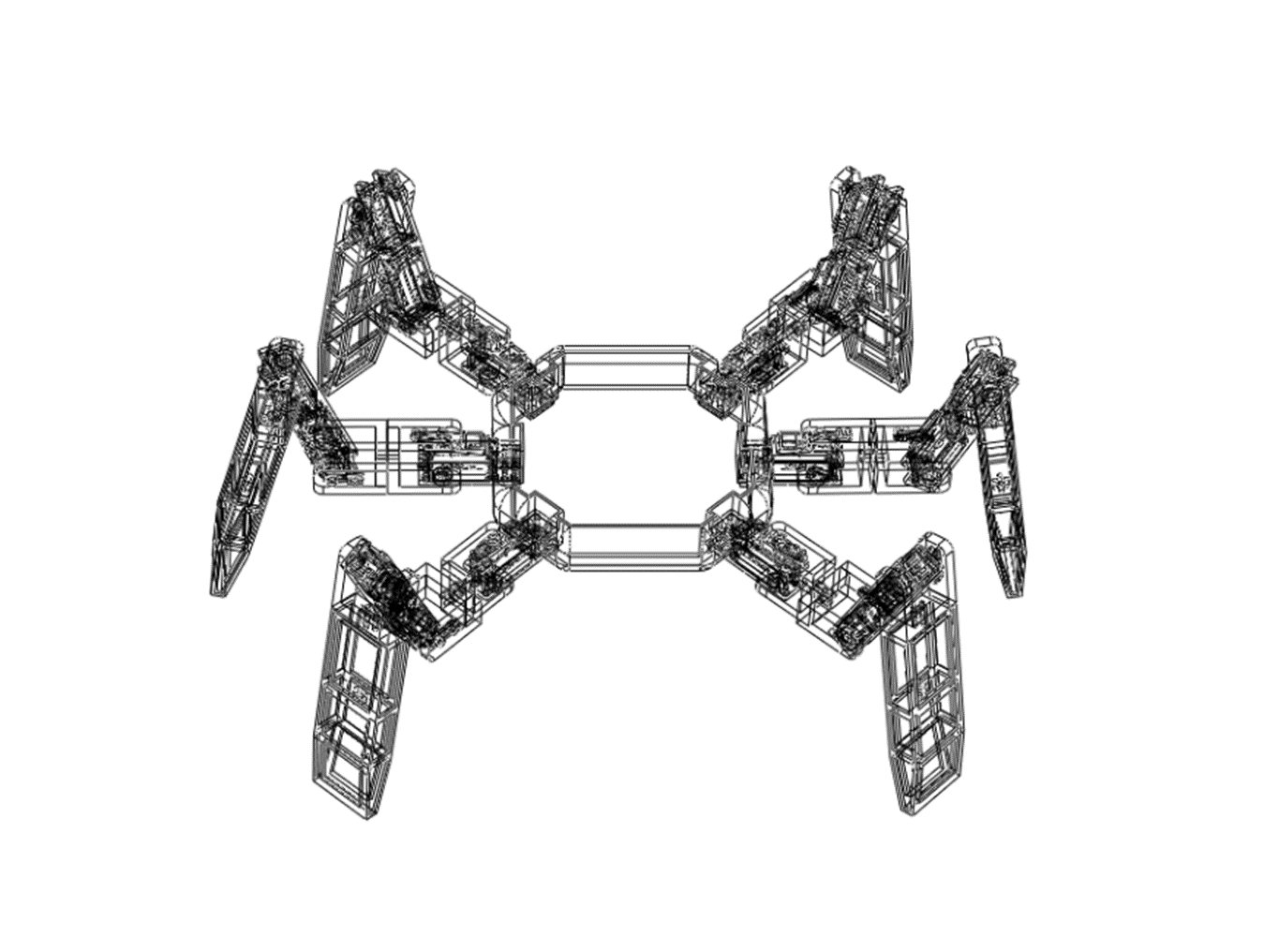
그로 인해 중심이 맞지 않는 불균형 문제가 존재하고 열해석, 응력, 강도해석등 해석이 전혀 고려되지 않은 형태의 로봇이다. 이번 로봇을 바탕으로 다시 2차 모델을 제작하고자 하는데 3D 모델링을 해놓은 사진은 다음과 같다. 아래의 사진에 나타난 형태는 구조적으로 더 안정화된 형태의 모델이며 추후 제작 과정을 지속적으로 포스팅하고자 한다.
The model posted up to this point is not scientifically or structurally suitable, but rather a form that is produced at one's own will.
As a result, there is an imbalance problem that is out of center, and it is a robot in a form that does not take into account any analysis such as thermal analysis, stress, and intensity analysis. Based on this robot, I would like to manufacture the second model again, but the 3D modeling photo is as follows. The shape shown in the picture below is a more structurally stable model, and I would like to continuously post the manufacturing process in the future.
'로봇 제작 (Robot) > 거미로봇 (Spider Robot)' 카테고리의 다른 글
| 6족 거미로봇 제작기 (Part.2) 6-legged Spidre Robot Maker (part.2) (0) | 2024.01.12 |
|---|---|
| 6족 거미로봇 제작기 (Part.1) 6-legged Spidre Robot Maker (part.1) (0) | 2024.01.11 |

